Ant-Roach

As a contractor for MEKA Robotics, I worked with OtherLab to create the control system for a six-legged walking inflatable robot used to characterize a new kind of novel pneumatic actuator.
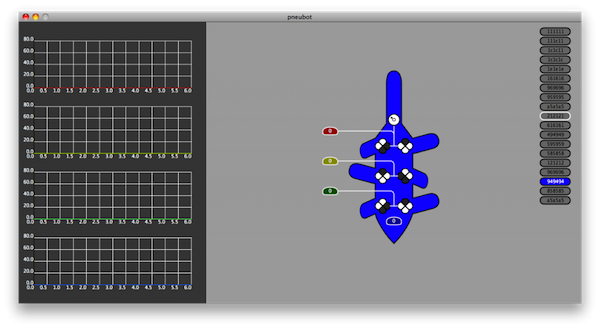
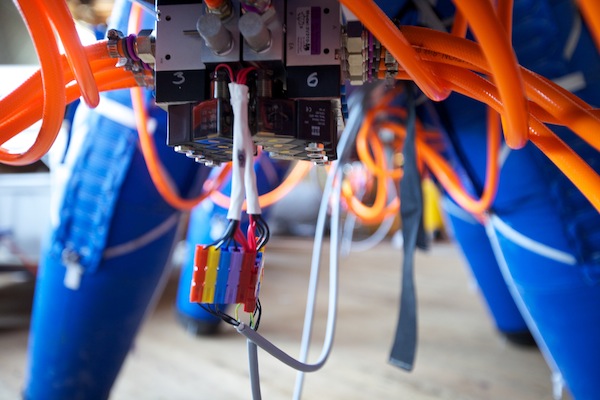
I designed the pneumatic valve system, control electronics, and wireless software interface for the robot.